Duration
2022 - 2024
Gecko Mobility Aids
My Role
Industrial Designer
ABOUT THE PROJECT
What are the Gecko Mobility Aids?
My contributions
PROJECT BACKGROUND
Why Gecko Mobility Aids?

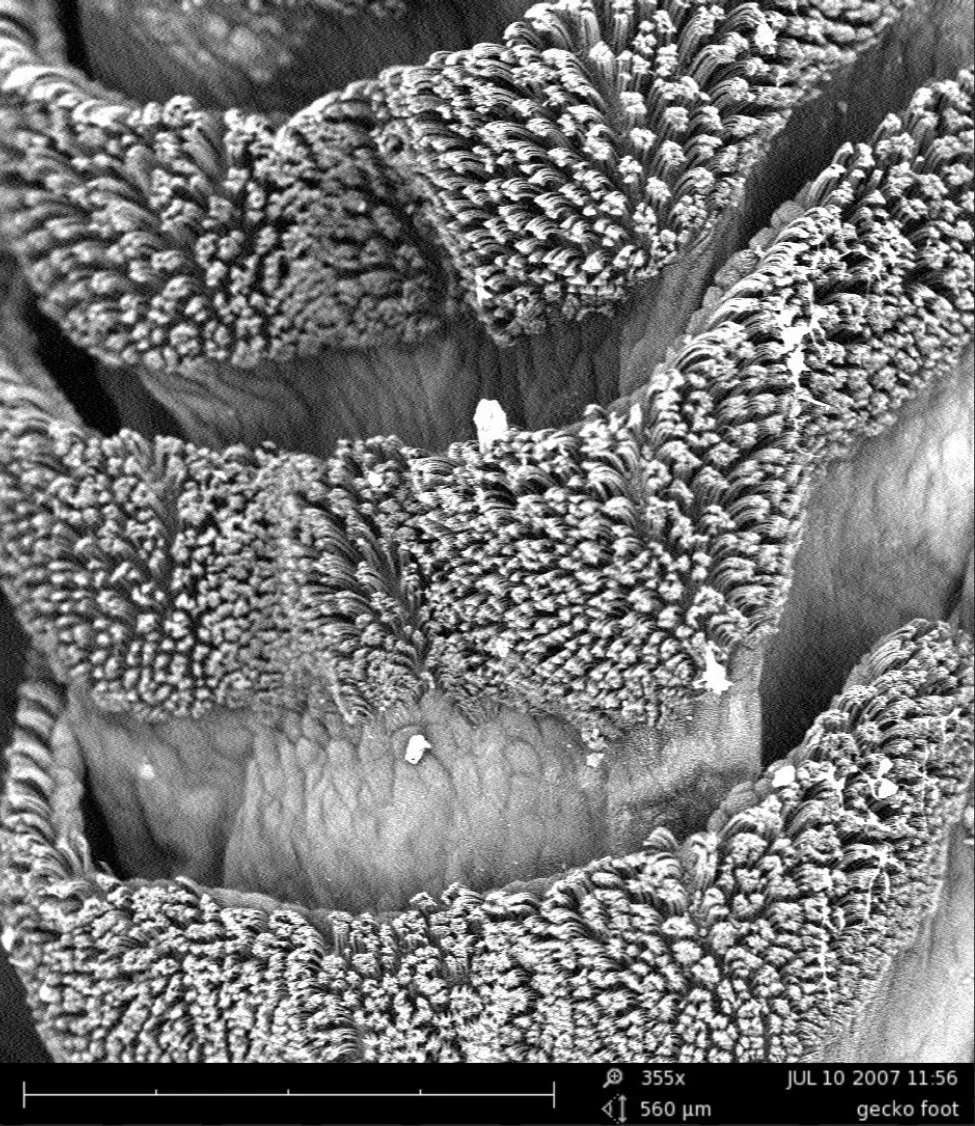
The Gecko Material
To gain a deeper understanding of the synthetic gecko material and its limitations, I utilized electron microscopy to capture detailed imagery of its microstructure. These images reveal the organized grid of incredibly small fins that enable its adhesive properties, while also visualizing the material's susceptibility to damage and the accumulation of dust particles on its surface. This analysis provided valuable insights into the material's behavior and potential areas for improvement.
THE DESIGN
Suit Design V1


Traditional mobility solutions for zero or microgravity environments rely heavily on straps and railings, which are effective in weightless conditions but become hazardous in a gravity-rich setting. As advancements in artificial gravity systems make 1g environments more feasible, current spacecraft interiors—designed exclusively for microgravity—pose significant risks, including tripping hazards from protruding straps and railings. The Gecko Mobility Aids aim to replace these outdated systems with a bio-inspired solution that improves both safety and functionality. By leveraging advanced adhesion technologies, these aids ensure astronauts can move and stabilize themselves effectively, creating a habitat that adapts to changing gravity conditions while prioritizing the astronauts well-being.

Geckos can adhere to various surfaces due to millions of microscopic hair-like structures called setae on their feet. Each setae branches into hundreds of even smaller structures known as spatulae, which significantly increase the contact surface area. This extensive surface area enables geckos to exploit van der Waals forces—weak intermolecular attractions arising from temporary dipoles formed when electrons fluctuate within molecules. Although individual van der Waals interactions are weak, the cumulative effect across the vast number of spatulae generates substantial adhesive strength, allowing geckos to effortlessly climb walls and ceilings.
Inspired by this natural phenomenon, engineers at NASA's Jet Propulsion Laboratory (JPL) developed a synthetic material that mimics the gecko's microstructure. The Gecko Mobility Aids leverage these advanced materials to create a user-friendly solution for movement and stabilization in micro and zero gravity.
Team
Responsibilities
Industrial Design, Material Research, User Testing, UX Research, Rendering
Gecko Mobility Aids are a line of uniform pieces designed to assist mobility in reduced gravity environments. Inspired by the adhesion mechanisms of geckos, these uniforms utilize a synthetic gecko material that enable astronauts to stabilize themselves and maneuver effectively in microgravity or lunar gravity conditions. By embedding the gecko-like adhesive technologies directly into the uniforms, they reduce the need for railing and other mobility assisting structures. This offers a more practical solution for movement and stability.
While working in the Human Factors Division at NASA, I played a pivotal role in the conception of Gecko Mobility Aids as well as being the first to integrate the Gecko Material into wearables. I led the effort in conceptualizing the designs, conducting material and user research, building prototypes, and facilitating user testing to support our findings. Additionally, I was responsible for modeling and rendering the concepts, creating visually compelling presentations for the board to secure necessary funding. This multifaceted role allowed me to bridge design, research, and communication.
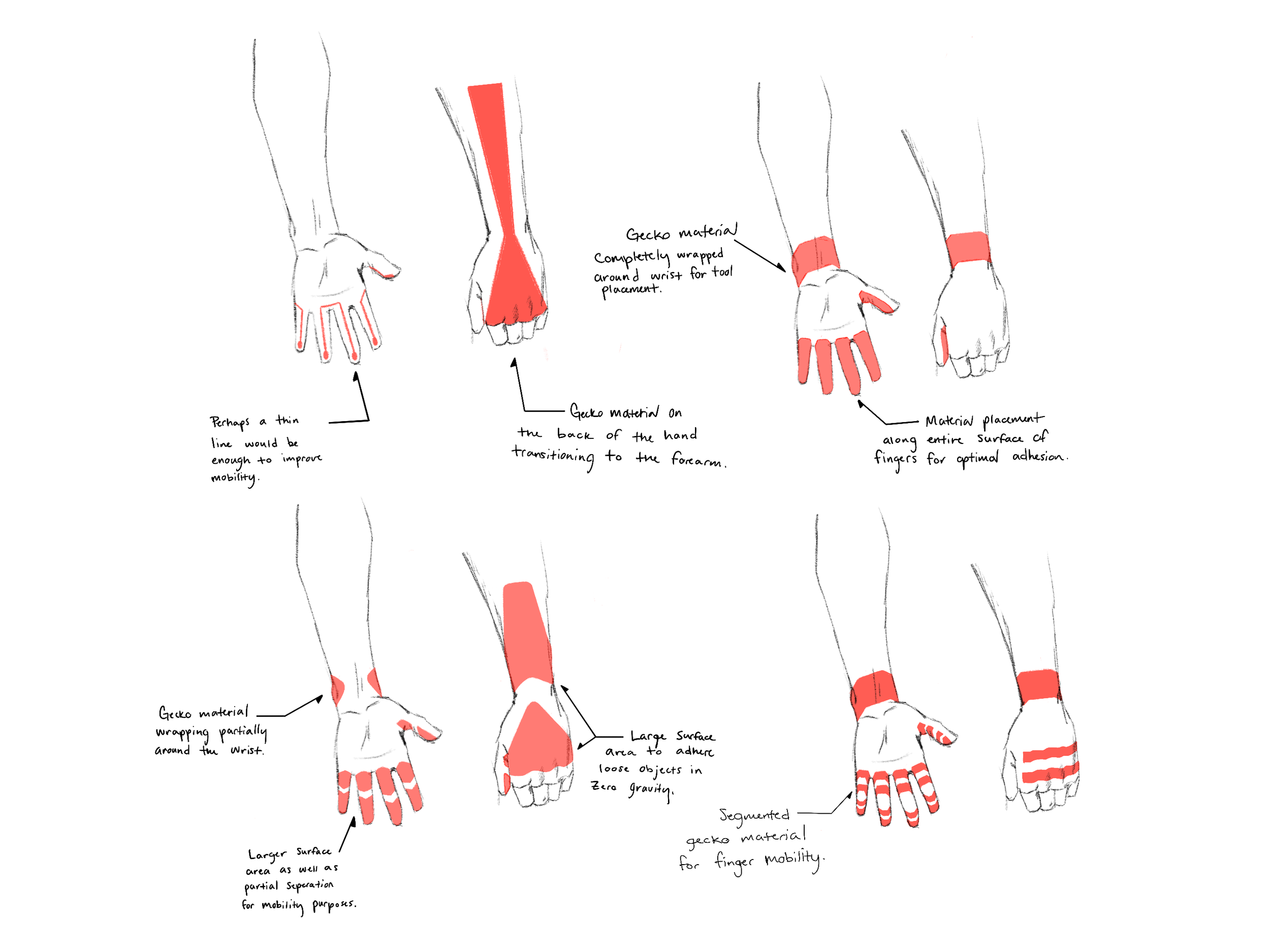
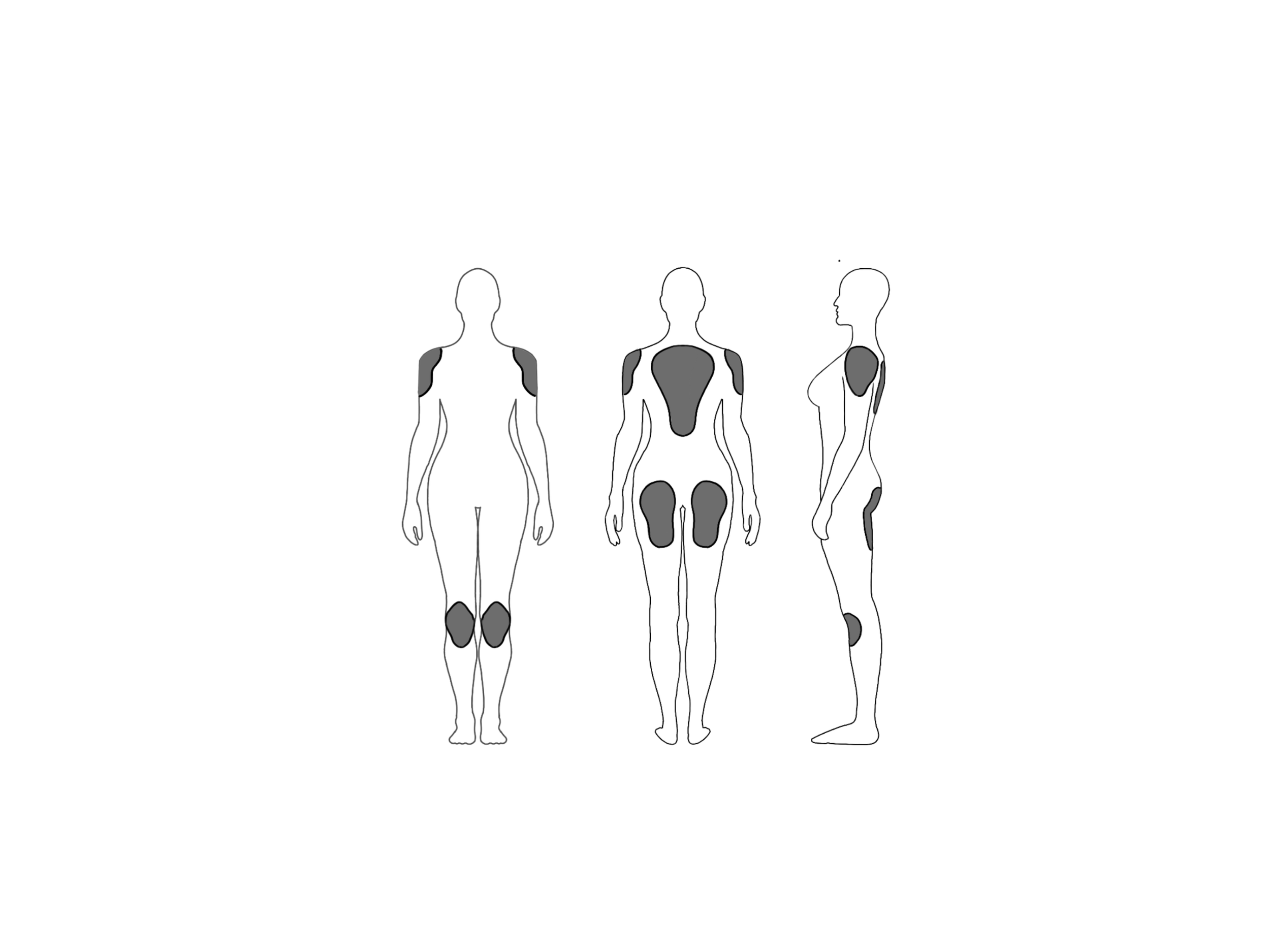
Ergonomics and Body Mapping

Building upon the material research, I identified optimal points of contact on the body to integrate the gecko material. I was focused on determining effective anchoring locations to improve stability in reduced gravity environments. By mapping these key contact areas, I developed functional concepts that allowed for subsequent prototypes.



Human Factors / Habitability






In the initial design phase, I drew inspiration from NASA's traditional "Uniform" archetype to develop garment concepts. However, feedback highlighted the need for the Gecko Mobility Aids to be less rigid and more adaptable for users. This insight guided the evolution of the design toward a uniform line that aligned more closely with the flexibility and practicality of athletic wear.














Prototyping and Discovery


During low-fidelity prototyping I explored the practical functionality of the gecko material. The grain direction identified in prior research proved essential to its performance when interfacing with the body. It became evident that the microstructure needed be altered to accommodate a broader range of movements. This required transitioning from a rigid, gridded layout of synthetic setae to a more organic arrangement.








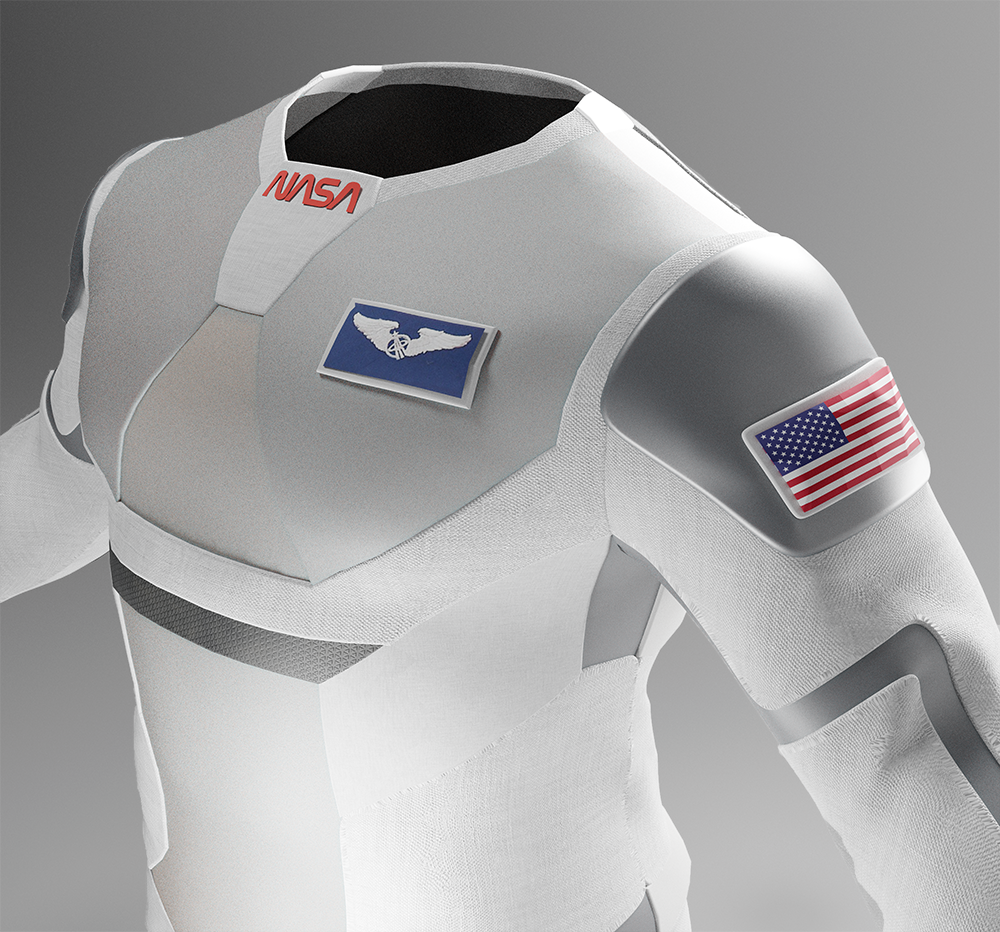
Suit Design V2
Building on previous findings, I took a contemporary approach to garment design, aiming for a more functional uniform for everyday use. Through iterative development, I organized the gecko material into a tile-based system, maximizing surface area while ensuring seamless integration with the body's movements.

Gecko Mobility Aids Project Patch
Takeaways
Moving forward, I plan to advance 1g and zero-gravity testing to validate and refine the designs further. Expanding the Gecko Mobility Aids to accommodate a broader range of body types will be a key focus, ensuring its functionality adapts to diverse users. These efforts aim to develop a more ergonomic and universally accessible solution for space habitation.